Ok, so I want to say, Oscium’s customer service is absolutely the best! Super fast communication, and they legitimately just want to get you back up and running as quickly as possible! Thank you for that!😁😁😁

This o-scope was a great add to our lab where we don't need a scope regularly, but when we need it, we need it. The low investment and easy to use interface gives us what we need for the times we need it and have had no issues with capabilities or accuracy. Having a calibrated instrument on hand is also perfect for maintaining audit requirements without having to spend a lot on rentals. On top of it all, some of the best customer service I've ever experienced.

This oscilloscope is very user friendly. It provides the basic functions of a higher level oscilloscope but cheaper. It is easy to use and take anywhere. Over all, I am very satisfied with it.
Wi-Fi 6/6E spectrum analyzer with legacy support (2.4 & 5 GHz)
Visualizes all RF signals (2.4-2.5 GHz, 5.145-5.860 GHz & 5.925-7.125 GHz)
Scan & Troubleshoot Wi-Fi
Compatible software partners (including site survey)
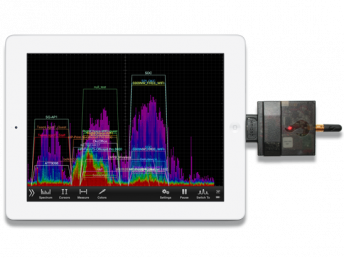
Now that the FCC has approved unlicensed use for the 6 GHz band, many professionals lack the tools to look into Wi-Fi 6/6E. With WiPry Clarity, you’ll have visibility into all three Wi-Fi bands: including Wi-Fi 6/6E, 2.4 GHz, and 5 GHz. Wireless internet operates in these ranges as do other electronic devices such as baby monitors, cordless phones, garage door openers, and microwave ovens. Since Wi-Fi can extend the length of a football field on 2.4 GHz, devices in nearby buildings or residences can also cause interference. With WiPry Clarity, you can pinpoint the source of your noise and get the most out of your wireless internet regardless of the complexity of your environment.
The WiPry Clarity software visualizes all wireless activity on all ISM bands (2.4-2.5 GHz, 5.145-5.860 GHz and 5.925-7.125 GHz). Measurement settings include 802.11b, 802.11g, 802.11n, 802.11ac, 802.11ax and 802.15.4 (ZigBee). Oscium provides a professional Wi-Fi tool to solve all your wireless problems. Visualize your network like never before.
Oscium features include:
grade channeling (using A through F, just like in school!)
signal to noise ratio (perfect for knowing whether VoIP or video streaming is possible)
play/record (helpful in capturing intermittent issues)
birth certificates (tracks Wi-Fi health)
view environment over time using waterfall mode
Hardware Frequency Range: 2.2 GHz - 7.25 GHz
Frequency Resolution: 25 KHz
Amplitude Range: -95 dBm to -5 dBm
Filter Bandwidth: 58 KHz to 812 KHz
Antenna: Included Tri-Band Omni-directional Antenna
Antenna Port: RP-SMA
Windows 7
Mac OSX 10.14 Mojave (Mac support coming soon!)
WiPry Application Frequency Ranges:
2.400-2.500 GHz
5.145-5.860 GHz
5.925-7.125 GHz
WiPry Application Frequency Resolution
2.4 GHz: 390 KHz
5.8 GHz: 1.396 MHz
6E: 1.786 MHz
![]()
![]()
WiPry Clarity Spectrum Analyzer Hardware
Tri-band Antenna (optimized for all three Wi-Fi bands)
USB-C to USB-C Cable
USB A to USB-C Cable
Ruggedized Carry Case
The Quickstart Guide will help you get started as well as the FAQ.